

DextaRobotics Builds Hand Haptics Device for Virtual Reality Medical Learning
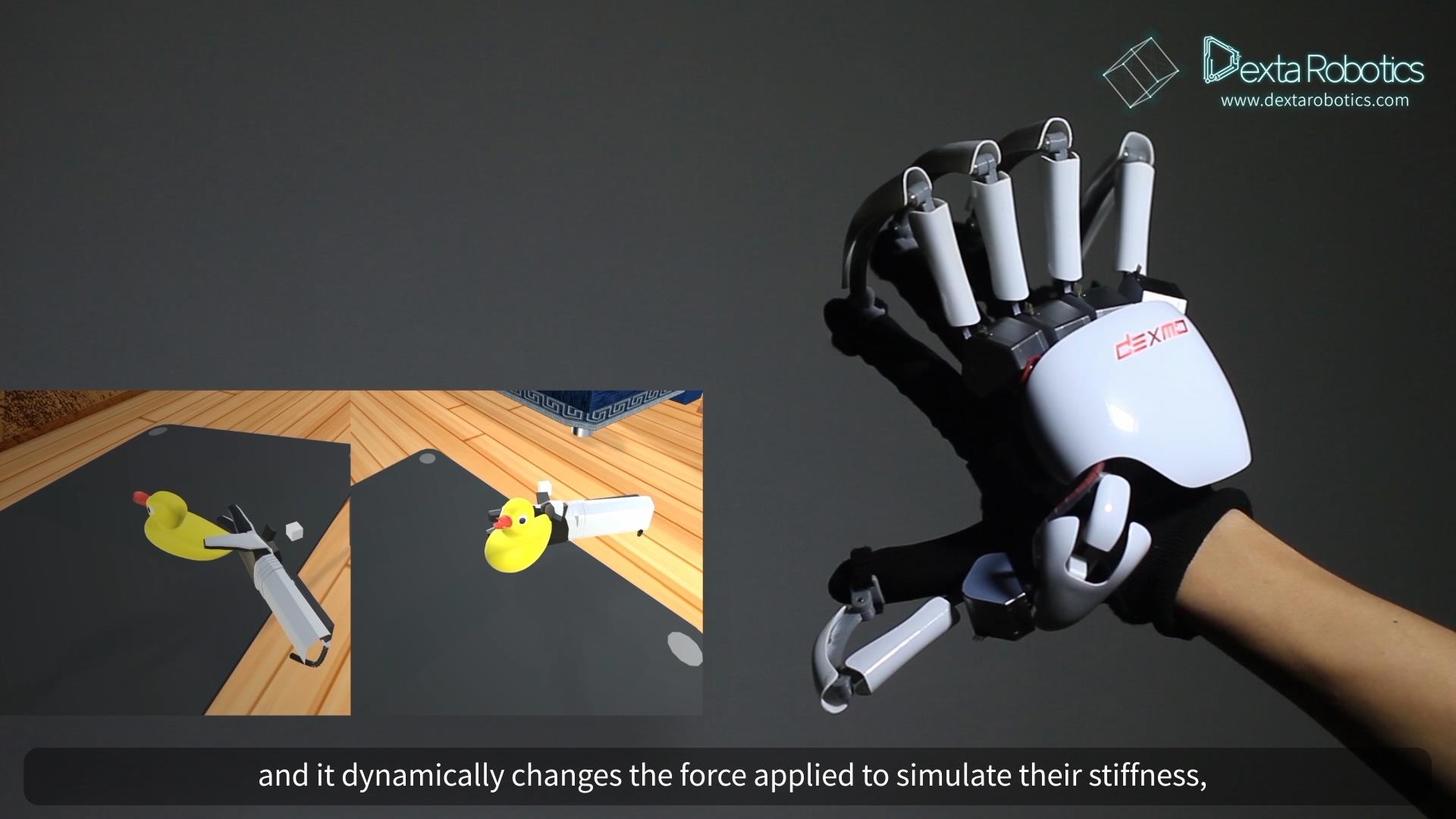
One of the limitations of current virtual reality systems is the lack of tactile feel when engaging with realistic learning environments. Angleing a scalpel, inserting an NG tube, feeling a pulse — all of these critical skills that require touch to learn and perform properly. where touch Without a doubt physical touch technology will have to become integrated into advanced technologies in-order to maximize learning outcomes. Recently, Dexta Robotics released a product which is taking a giant leap forward into the touch of VR. Check out the video to see the prototype in action:
Sponsored Content:
About Dexmo
Compared to other force feedback devices, Dexmo is very light. It can run on battery power and work wirelessly for a relatively long time. Dexmo captures 11 DoF of users’ hand motion. The mechanical linkage nature makes the readings much more robust compared to IMUs. The force feedback ability allows the user to feel the size and shape of any digital object, which greatly improves immersion. Variable stiffness is achieved by precise motor control. With this feature, each virtual object can have their own stiffness. In the past two years we have made over 20 iterations of Dexmo and tested numerous force feedback methods. These valuable experiences helped us build a better human-machine-interaction tool.
Learn more about the Dexmo on the DextaRobotics Website

Lance Baily, BA, EMT-B, is the Founder & CEO of HealthySimulation.com, which he started while serving as the Director of the Nevada System of Higher Education’s Clinical Simulation Center of Las Vegas back in 2010. Lance is also the Founder and acting Advisor to the Board of SimGHOSTS.org, the world’s only non-profit organization dedicated to supporting professionals operating healthcare simulation technologies. His co-edited Book: “Comprehensive Healthcare Simulation: Operations, Technology, and Innovative Practice” is cited as a key source for professional certification in the industry. Lance’s background also includes serving as a Simulation Technology Specialist for the LA Community College District, EMS fire fighting, Hollywood movie production, rescue diving, and global travel. He and his wife Abigail Baily, PhD live in Las Vegas, Nevada with their two amazing daughters.
Sponsored Content:
Sponsored Content:














